One of the most important principles of vehicle
dynamics software is that the driver is a part of the
control system that is controlling vehicle motion. There
has to be co-operation between the driver and the control
software, and it is therefore important that the driver
and the control system software both understand each
other suffi ciently well to work as a team. The key is to
have two-way communication between the driver and the
vehicle, with driver inputs enabled by the controls, and
vehicle feedback transmitted via the various displays
and alert sounds.
Drivers develop their skills by driving cars, which
means that control algorithm designers can
generally only expect drivers to know about
what they have already experienced.
However, some extrapolation beyond
a driver’s previous experience can
still meet the driver’s expectations,
as long as the control responses
follow the same logic that the
driver has already experienced.
A driver will expect the car
to respond to his or her
inputs in a manner that
is consistent with their
previous experience; the
driver won’t expect the car
to do something that doesn’t
relate to their previous
experience. The exception
to this would be if the driver
has memorised the car’s user
manual, but drivers rarely do.
CONTROL SOFTWARE 23
ALGORITHMS
For many reasons, engineers often like to include a
discontinuity in control algorithms. For example, there
may be a good reason to make a vehicle behave differently
above a certain speed, such as limiting exposure to a
safety concern. I would then ask how the engineers expect
the driver to know about this action, and if the driver
will be unpleasantly surprised when they experience
it. For example, if the system makes the vehicle behave
differently when travelling at 50.0km/h to when it is
travelling at 49.9km/h, the driver may not expect this
change – particularly since they are unlikely to be aware
of their speed to that level of accuracy.
My most dramatic experience of vehicle
discontinuity was in a car with autonomous
cruise control, which exceeded its 3m/s2
braking limit behind a lead car whilst
approaching a roundabout, and
then abruptly stopped braking. In
response I had to apply the brakes
rapidly and much harder than the
system had been.
Control discontinuities are
thus not preferred, but the
good news is that control
can be softened or blended
to eliminate or mitigate
discontinuities. Control gains
in particular can be ramped
up so that certain responses
can be smoothly blended away
to nothing in a way that drivers
will accept and then expect.
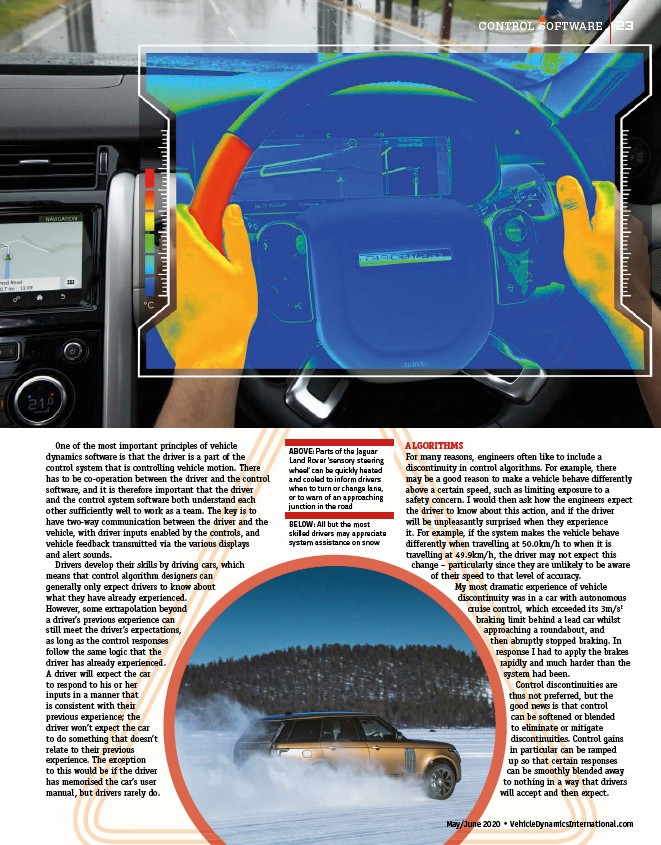
ABOVE: Parts of the Jaguar
Land Rover ‘sensory steering
wheel’ can be quickly heated
and cooled to inform drivers
when to turn or change lane,
or to warn of an approaching
junction in the road
BELOW: All but the most
skilled drivers may appreciate
system assistance on snow
May/June 2020 • VehicleDynamicsInternational.com
/VehicleDynamicsInternational.com