26 CONTROL SOFTWARE
when a hydraulic pump stopped running, to when I
started to apply opposite-lock steering input to stabilise
the car. This procedure was repeated, with the steering
response only occurring when required – and it was
required due to an issue in the development software.
It is therefore reasonable to conclude that a human driver
may respond in around 100ms, so no control system
should rely on the driver being slower than that. It might
be interesting to research how driver response times
improve over time. I think it’s about pre-programming
the subconscious mind, but this goes way beyond the
scope of my engineering confi dence.
RESPONSE SPEED
If drivers can respond to a perceived change in
a dynamic situation in around 100ms, this means
that electronic systems have to act extremely
fast if they are expected to react more
quickly than the driver. That is not to
say that all systems activities have to
happen so fast that the driver can’t
perceive them, but a driver may
respond appropriately if they
have a similar response speed
to that of the system.
Today’s stability control
systems are a good
example of a system that
may overlap the driver’s
response rate in an
acceptable way, although
there are instances where it
has not been perfect (such
as stabilising brake interventions occurring only after the
driver has already stabilised the vehicle via a steering
wheel input). Stability control has been a successful
technology because it assumes that the driver inputs will
be in accordance with what is required in ‘normal’ driving
and corrects the vehicle dynamics towards that ‘normal’
target behaviour. The driver may well learn through
experience that a vehicle fi tted with a stability control
system requires only about half as much opposite lock for
stabilisation compared to a car without such a system.
LAG CHARACTERISTICS
A skilled driver will learn a vehicle’s consistent lag
characteristics, such as how long it takes for the vehicle to
settle when steered into a corner. Electronic systems that
are not instantly effective must therefore behave in
such a way that the vehicle’s lag characteristics
are consistent and predictable, so that
a driver may learn how they can
expect the vehicle to behave in
various situations. Thus electronic
(decoupled) steering systems will
need to have fast actuators in
order for them to keep up with
the driver’s inputs, or to slow
down the movement of the
control input.
Mechanically coupled
steering systems on the
other hand have no issues
due to the mechanical
connection between
input and output.
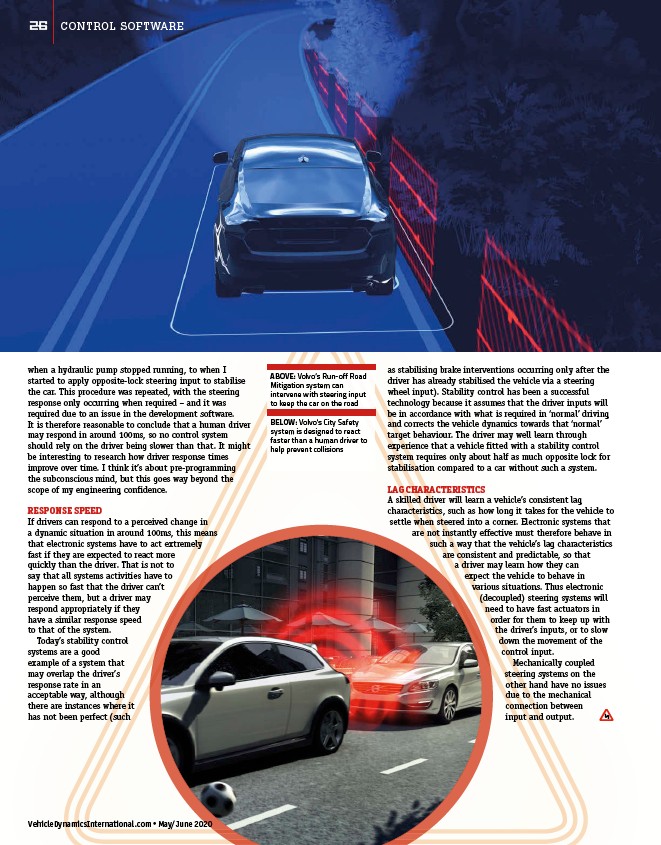
ABOVE: Volvo’s Run-off Road
Mitigation system can
intervene with steering input
to keep the car on the road
BELOW: Volvo’s City Safety
system is designed to react
faster than a human driver to
help prevent collisions
VehicleDynamicsInternational.com • May/June 2020
/VehicleDynamicsInternational.com